B3 - local truncation error
- the local error at a particular grid point due to discrete representation of the derivative
- considering a 2D PDE as an initial value problem
- the numerical solution for a grid point,
, at time step, , is:
- the function,
, gives a solution at time step, , based on solution at all special grid points at a current time, - for example, the first order ODE:
- the local truncation error is defined as:
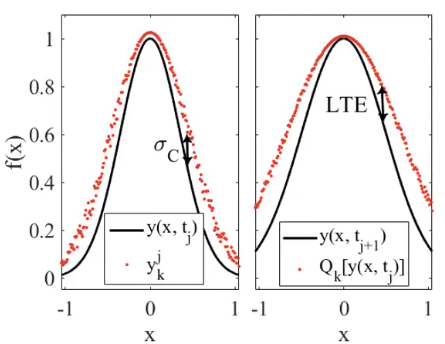
image: B Hnat, lecture notes
-
compares a numerical and the analytical solutions at a fixed time and a given point -
LTE evolves the analytic solution from time
to , and then compares the evolved solution to the analytic one at time -
the order of a numerical method measures the change in error of a numerical solution as step size is decreased
-
the scheme has order,
, in time and, , in space if and only if for any smooth solution of initial value problem, the following relation is true for some values and
-
so, the error decreases as
and are decreased -
eg: if
, decreasing and by decreases LTE by a factor of -
higher order scheme converge faster when the grid is made finer
-
the scheme is consistent if it has an order of at least
in each direction (ie. ) -
eg: considering an initial value problem given by an ODE with analytical solution,
, and the finite difference scheme:
- assuming that the solution is smooth, so it has a taylor expansion
- taylor expanding
around
- this scheme is consistent, and of order
stability
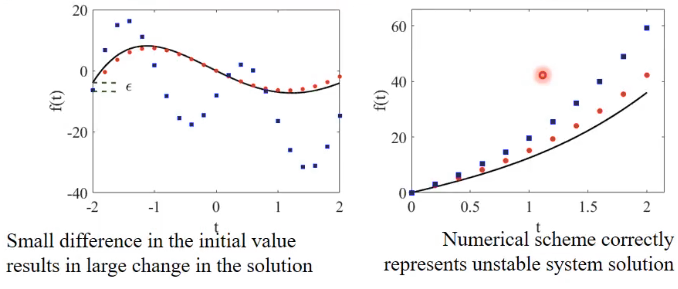
image: B Hnat, lecture notes
- introducing a small error,
, in the system - the numerical solution must stay closed to the unperturbed ones
- if the exact system is unstable, the divergence between trajectories should become small in relative terms as
- the numerical solution will still grow, but must do so at the correct growth rate of the system