PX155 - E2 - angular velocity vector
- angular velocity vector
has magnitude and direction parallel to the axis of rotation, sign according to the right hand rule
where,
- why?
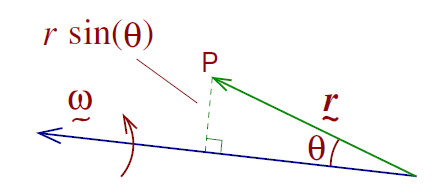
- P moves in a circle of radius
, and has velocity into the page - so as claimed,