PX153 - H5 - coordinate systems revisited
-
extension for circular polar coordinates
-
in general, in 3D, a coordinate system is defined by specifying 3 basis vectors at each point in space
-
usually orthonormal basis vectors
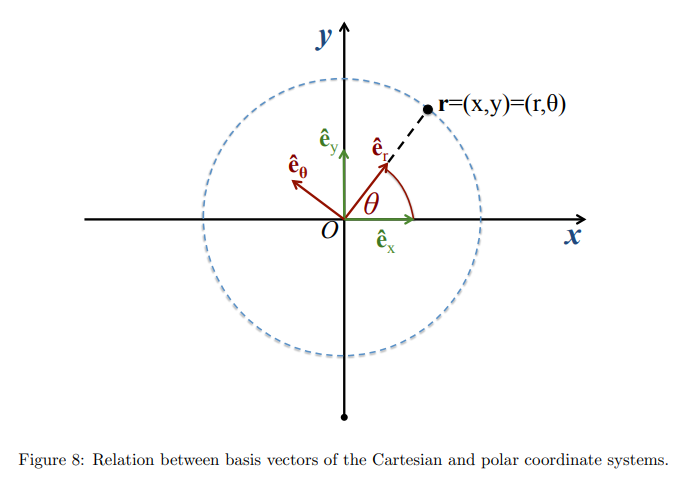
- for polar coordinates:
, where magnitude of the vector, and angle to the x-axis
- from figure above, and trigonometry:
- in cartesian coordinates:
- also,
- ie: basis vectors are in direction of increasing coordinate
- again,
- rewriting
$$\vec r = r \cos\theta ; \vec e_{x} + r\sin\theta ; \vec e_{y}$$
- we have,
- and,
$$\vec e_{\theta} = \left( \frac{\partial \vec r}{\partial \theta}\right){r} = -r \sin\theta ; \vec e + r \cos\theta ; \vec e_{y}$$
- note:
: $$\hat {\vec e}_{r} = \vec e_r$$ :
- both are functions of
only:
-
the position vector in cartesian coordinates is
, but in polar, it is -
eg: circular motion of an object with radius,
, constant angular velocity, - the linear velocity:
-
is a function of time:
$$\dot{\hat{\vec e}}{r} = \frac{d\hat{\vec e}r}{d\theta} \cdot \frac{d\theta}{dt} = \omega \hat{\vec e}{\theta}$$
- we know:
$$\vec v = \omega r \hat{\vec e}{\theta}$$
- this is a well known result,, and direction is tangential - similarly, acceleration:
- we know
is a function of time: