PX153 - A3 - position, velocity and acceleration vectors
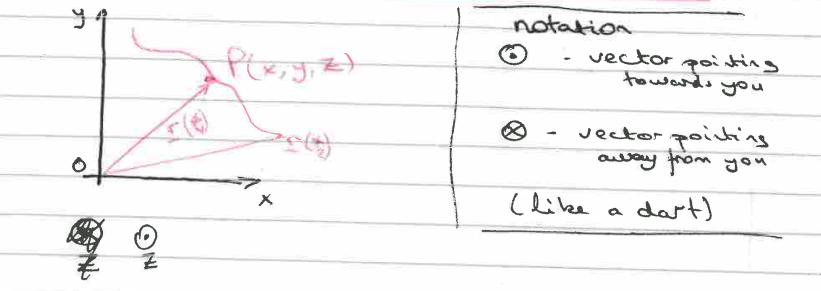
- position vector, usually
, describes the position of point P relative to the origin - eg: for trajectory of a particle,
- cartesian coordinates, initial position
- gravity is in the negative y direction
- initial velocity (
equations of motion in vector notation
- integrate to find velocity:
- integrating again:
- the components:
(check thatand are correct)
we can solve forusing
a parabola as expected