A1
vectors
- quantities with magnitude and direction
- direction:
- change in coordinate system will change the vector (doesn't change scalar)
vector fields
- describes vector that varies continuously in space
A2
- 3 linearly independent, usually orthonormal vectors used to define the projection of a vector along their respective directions
direction cosines
- relate to the components of to the its angle relative to the cartesian basis vectors
A3
position vectors
- position of a point with respect to the origin
- usually
describing motion
position
velocity
acceleration
- the components:
A4
vector operations
addition and subtraction
multiplication
scalar/dot product
- geometric definition: magnitude of one product projected on the other
- component of along
- cases:
- if , vectors are perpendicular
- if , vectors are parallel
- if , vectors are anti-parallel
- properties:
vector/cross product
- geometric definition:
- is perpendicular to the plane of and
- calculation:
where, ;
- basis vectors vary but are always orthonormal
A6
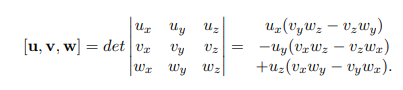
scalar triple product
vector triple product
A7
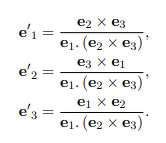
reciprocal vectors
- relevant for non-orthogonal basis sets